Moveit 한글 Package 정리
Moveit! 정리
Moveit!은 모션계획(Motion Planning)에서 비롯되어 ROS에서 보다 손쉽게 모션을 수행하기 위해 만든 하나의 프레임워크 오픈 API 모음이다. 이미 수많은 기업에서 Moveit!을 활용해 Motion Planning을 하고 있으며, 대표적으로는 NASA / Google / MicroSoft 등의 굴지의 IT기업이 주목하는 프레임워크라고 할 수 있다.
![]()
Moveit!은 최근 ROS2의 도입에 의해 Moveit!2를 론칭하면서, 사용자 환경을 개선해 나아가고 있다. ROS에서는 다관절 로봇 및 다양한 Motion 을 수행하는 로봇들이 존재하며, 이에대한 다양한 임무를 수행할 수 있는 로봇들이 있다. 각 로봇들의 관절 및 모션은 기구학적 설계에 따른 각기 다른 역학운동을 하도록 설계 되어있으며 임무수행을 위한 계획 역시 다르다. 이에, ROS에서는 Rviz와 연계를 통한 모션플랜을 통하여 로봇의 임무수행을 보다 원활하게 진행 할 수 있도록 Moveit! 이라는 프레임워크를 도입 및 사용하고 있다.
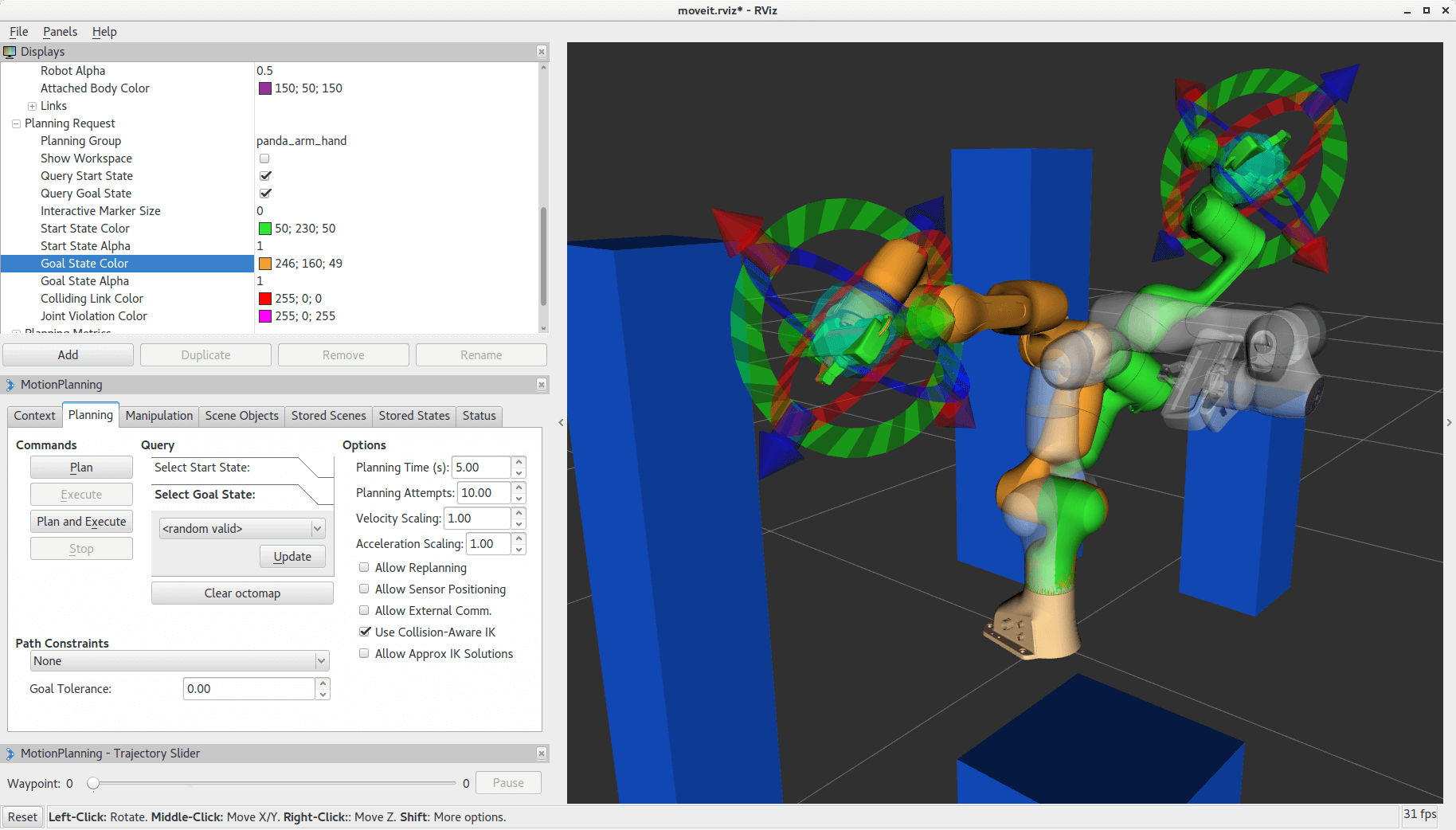
본 글에서는 Moveit!의 활용방법과 가장 보편적으로 사용되고있는 6Axis 이론을 접목시킨 API에 대해 언급하고자 한다. 일반적인 Moveit!은 Rviz를 활용하여 인터페이스 및 테스트를 진행하기 때문에, Rviz에서 Motion Planning 기능을 언급하게 될 것이다. 참고로 현재 Moveit 소프트웨어 솔루션을 참조한 로봇 메니퓰레이터는 약 150개 이상의 로봇이 채택하여 사용하고 있으며, 점점 더 넓고 광범위한 분야의 로봇들이 활용할 것으로 예상된다.
Moveit은 현재 2.2 Galactic Geochelone으로 개발자 버전이 배포되고 있으며 (현재시간 2020-10-14 14:10) 상용버전으로는 Foxy 2.1 LTS 버전이 존재한다. Moveit!은 ROS의 수많은 버전과 함께 같이 개발되었으며, 해당 개발 종료 시점은 하기와 같이 나와있다.
ROS - Kinetic 0.9 LTS - 2021 April
ROS - Melodic 1.0 LTS - 2023 May
ROS - Eloquent 2.0 Betat - 2020 Feb
ROS - Noetic 1.1 LTS - 2025 May
ROS - Foxy 2.1 LTS - 2023 May
ROS - Glactic 2.2 Devel - TBD
Moveit Tutorial에서 활용하고 있는 내용은 Franka Emika 회사의 Panda 협동 Robot으로 대중적으로 활용되고 있는 6축로봇인듯 하다.
Motion Planning(모션계획)이란?
로봇팔이 자신의 구동부인 서보(Servo)와 연계되어 작업이나 이동을 위한 경로(Path 또는 Trajectory)를 정하는 행위를 의미
모션계획은 크게 2가지로 나뉘는데, Local Motion Planning 과 Global Motion Planning으로 분류되어진다.
- Local Motion Planning
- 하나의 국지적 장소에서 충돌 회피 등을 위한 Path를 정하는 것
- Global Motion Planning
- 전체적인 Task에 기반한 Motion Planning
ROS에서는 다관절 로봇 및 다양한 Motion 을 수행하는 로봇들이 존재하며, 이에대한 다양한 임무를 수행할 수 있는 로봇들이 있다.
이에 따라, Moveit!은 홈페이지에서 다음과 같은 기능을 기술하고있다.
- 3D 상호 가시화 기능
- Gazebo(물리시뮬레이션) 과의 연동
- 각종 역학적인 동작을 수행하는 기구들의 설정을 도와주는 Setup Assisant Tool
- 각 기구들의 동작을 수행하는 수행계획과 상호작용의 분석
- 각 기구들의 파이프 라인 및 실린더 객체에 대한 개체 분석 및 그립을 통한 Pick and Place 시뮬레이션 등을 가능하도록 하는 도구
해당 각 기능에 대한 API와 시작 방법은 하기에 기술하도록 하겠다.
Moveit! 지원 언어
Moveit!의 경우 Python, C++를 지원하고 있으며, Script인 Python 언어 보다는 C++ 을 활용한 객체 언어를 활용하는것이 좋다.

Class : MoveGroup
가장 간단한 유저간의 인터페이스는 MoveGroup Class를 활용하는것이다. 이 클래스는 사용자들이 쉽게 기능을 수행 할 수 있도록 관절 상태 세팅을 구체화 하고, 목표 도달점과 모션계획을 생성하고 로봇을 움직이고 객체를 더하고 환경정보와 사물의 Pick & Place를 관리한다. ROS1에서 사용하는 통신인 Services, Actions를 통하여 메세지 정보를 전달하고 메시지를 받는 노드들은 각 기능을 수행한다.
C++ 을 활용한 각 API에 대한 활용 및 이를 활용한 Visualization 등에 대해 정리하도록 하겠다.
Setup
Moveit!에서는 Planning groups라는 객체선언을 통해 해당 Class에 API를 Trigger 시키는 형태로 운영한다.
C++ 기준 Rviz 내 존재하는 Planning Group의 로봇 이름을 찾아 선언한다.
static const std::string 선언 이름 = "로봇 이름";
먼저 MoveGroup 객체를 잡고 해당 로봇의 제어와 계획을 잡고싶은 것에 대한 API를 호출한다. 해당 MoveGroup 객체를 선언하는 방법은 다음과 같다.
moveit::planning_interface::MoveGroupInterface move_group(PLANNING_GROUP);